

논문 제목은 ‘다중경로 전략 데이터를 활용한 Decision Transformer 기반 안전성 – 효율성 조절형 드론 경로계획 알고리즘’이다.
러시아-우크라이나 전쟁은 드론이 정찰·감시·공격 등 다목적 임무를 완수하며 전장의 양상을 뒤집을 수 있음을 입증했다. 이에 따라 완전 자율 비행을 위한 궤적 생성 연구가 빠르게 진화하고 있지만, 임무 특성에 맞춰 안전성과 효율성을 실시간으로 조절할 수 있는 플래너는 아직 드물다.
기존 연구는 주로 비행 거리 단축이나 에너지 절감처럼 ‘효율성 향상’에 초점을 맞췄다. 전통적 플래너에도 안전성과 효율성의 비중을 바꿀 수 있는 파라미터가 존재하지만, 이를 실제 임무에 맞게 손질하려면 숙련된 전문가의 노하우가 필수다.
따라서 복잡하지 않으면서 직관적으로 두 요소를 제어할 수 있는 플래너가 절실하다.
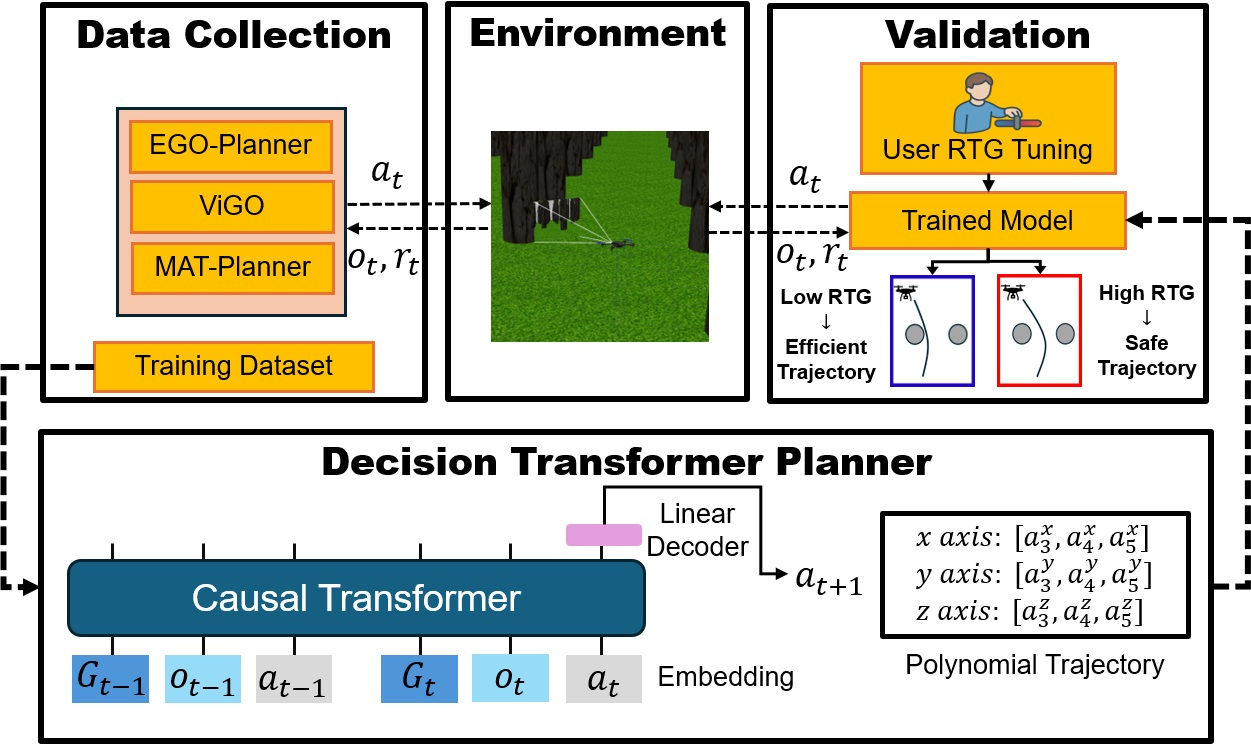
연구진은 이러한 요구를 충족하기 위해 강화학습 기반 Decision Transformer를 활용한 드론 궤적 생성 플래너를 개발했다. 효율성을 중시한 궤적과 안전성을 강조한 궤적을 모두 학습시킨 뒤, 사용자에게 노출되는 제어 파라미터를 ‘드론-장애물 최소 거리’ 하나로 단순화했다. 덕분에 전문 지식이 없더라도 슬라이더 하나만으로 ‘안전 모드’와 ‘효율 모드’를 즉시 전환할 수 있다.
한연희 교수는 “약 900편이 출품된 가운데 단 10여편만 선정되는 최우수상을 받을 수 있었던 것은 학생들의 열정과 노력이 있었기에 가능했다”라며 학생들에게 수상의 공을 돌렸다.