
꼭 사람모양일 필요는 없다…'빨판 손'·'바퀴 발' 기능 확장 나선 스마트공장 로봇
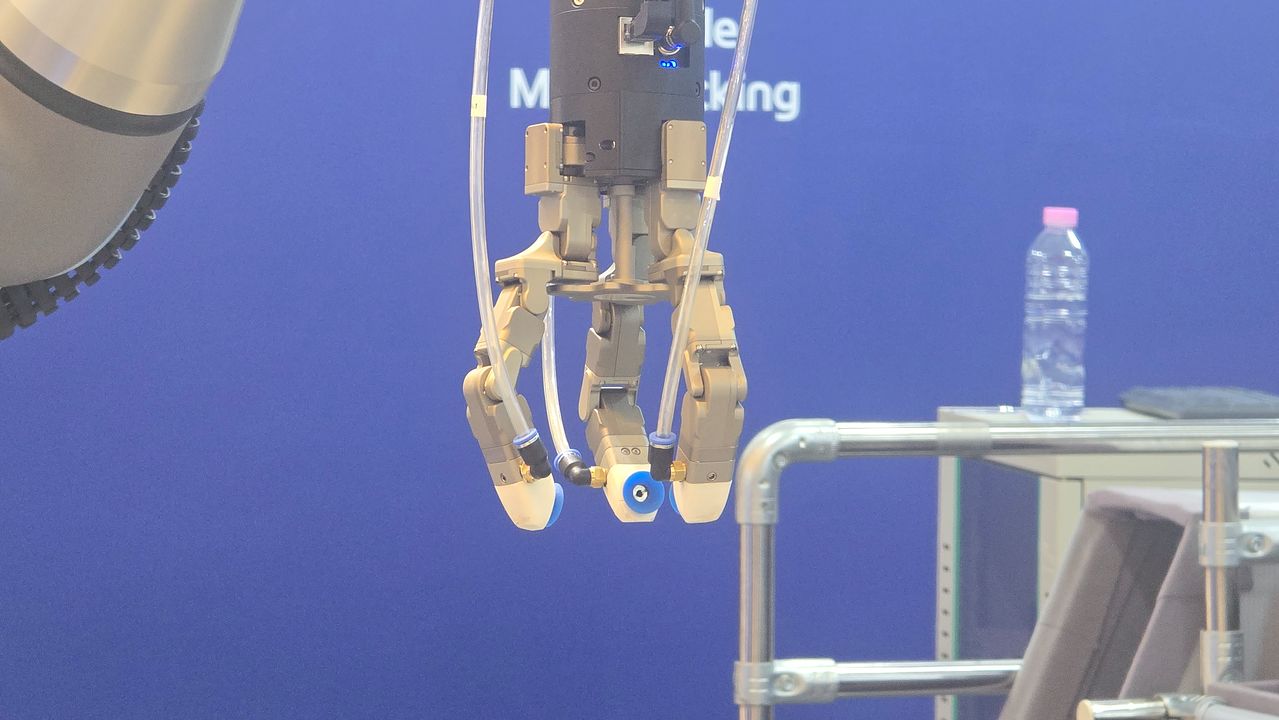
로봇은 사람의 손격인 ‘그리퍼’로 부품을 집어 옮기는 것처럼 보였지만, 자세히 보면 집은 게 아니었다. 실제로는 사람 손보다 더 다양한 방식으로 물건을 다룰 수 있는 로봇이었다. 그리퍼 끝에 문어 빨판처럼 동그란 흡착식 장치 ‘석션패드’가 달렸다. 부품에 닿으면 연결된 튜브를 통해 공기를 빨아들여 부품을 그리퍼에 붙이고, 부품을 이동시켰다. 이후 부품을 원키트 각 칸에 내려놓고 안쪽으로 넣을 때는 집어서 넣었다. 물건을 집는 사람의 손을 그대로 모방한 로봇이 아니라, ‘집기’와 ‘흡착’을 동시에 할 수 있는 ‘하이브리드 그리퍼’가 적용된 로봇이기 때문이다.
최근 로봇 업계의 화두는 인간의 외형을 닮은 ‘휴머노이드 로봇’이다. 하지만 이날 전시회에서는 인간 자체의 형상보다는 ‘손’ 또는 ‘발’ 등 신체 기능을 극대화하거나 뛰어넘는 특화 로봇들이 실제 공장 등 현장에 투입될 채비를 마치고 있었다. 휴머노이드 로봇 대비 개발 속도가 빠르고, 개발 비용이나 에너지 사용면에서 보다 효율적이라는 판단에서다.


휴머노이드 로봇보다 바퀴 달린 로봇이 실외 공정에 적합할 수 있다는 분석도 나온다. 모베드는 시속 10㎞ 속도로 최대 20㎝의 단차를 넘고, 10도의 기울기까지는 흔들림 없이 이동할 수 있다. 김영훈 로보틱스사업2팀장은 “사람이 서 있을 때도 힘이 들듯 로봇을 두 발로 서있게만 해도 에너지가 들기 때문에 효율면에서 바퀴가 뛰어나다”며 “빠르게 넓은 공간을 움직일 때 훨씬 유리할 것”이라고 말했다.

이수정([email protected])