
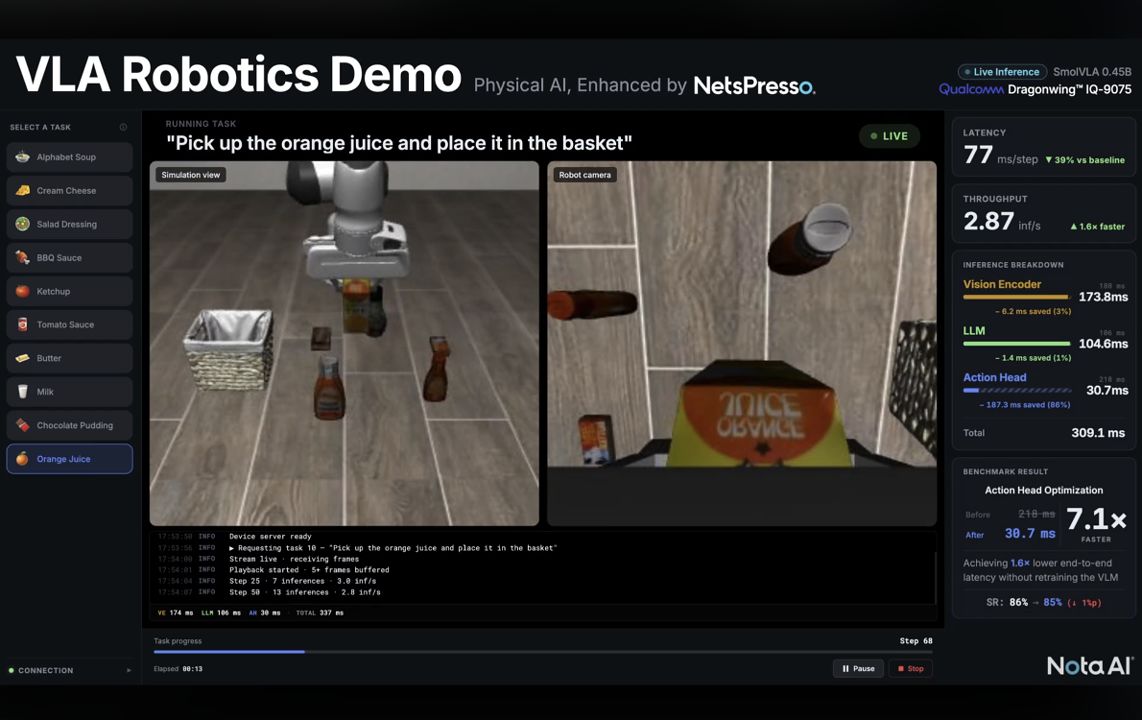
임베디드 비전 서밋 2026에서 시연한 VLA 모델 최적화 데모.
피지컬 AI는 AI가 카메라 등 센서를 통해 실제 환경을 인식하고, 사람의 명령이나 주변 상황을 이해한 뒤 이를 행동으로 연결하는 기술 영역이다. 로봇·제조·물류 등 다양한 산업에서 피지컬 AI 활용 가능성이 커지면서 시각 정보와 언어 명령을 함께 이해하고 실제 동작을 생성하는 VLA 모델의 중요성도 높아지고 있다.
다만 VLA 모델은 이미지 인식, 언어 이해, 행동 생성 과정을 함께 처리해야 하는 고연산량 모델이다. 일반적으로 GPU 서버 기반 환경에서 구동되는 경우가 많으며, 임베디드 디바이스 단독 환경에서 실시간 수준으로 안정적으로 실행하는 사례는 아직 제한적이다. 특히 로봇이나 산업 현장처럼 빠른 반응이 필요한 환경에서는 클라우드 의존도를 낮추고, 디바이스 자체에서 AI 모델을 빠르고 안정적으로 구동하는 최적화 기술이 중요하다.
노타는 퀄컴 최신 엣지 AI 디바이스인 Dragonwing™ IQ-9075 환경에서 VLA 모델인 SmolVLA 0.45B가 작동할 수 있도록 구현하고, 실시간성 향상을 위한 최적화를 적용했다. 특히 SmolVLA 0.45B는 현재 퀄컴에서 공식 지원되지 않는 모델임에도 노타가 모델 구조와 디바이스 실행 환경을 고려해 자체적으로 구동 환경을 마련했다.
노타는 해당 성과를 미국 산타클라라에서 열린 임베디드 비전 서밋 2026에서 공개했다. 현장에서는 시뮬레이터 기반으로 관람객이 직접 물품을 선택하면 최적화된 VLA 모델이 이를 인식하고 로봇팔 동작을 생성해 선택한 물품을 집어 바구니에 넣는 과정을 실시간으로 체험할 수 있도록 구성했다.
이번 성과는 노타의 AI 최적화 기술이 기존 온디바이스 AI 영역을 넘어 피지컬 AI 분야로 확장되고 있음을 보여준다. 특히 로봇, 산업 자동화, 스마트 제조, 물류, 지능형 공간 등 실제 환경에서 AI가 즉각적으로 판단하고 행동해야 하는 분야에서는 하드웨어 특성과 모델 구조를 함께 고려한 최적화 기술이 필수적이다.
채명수 노타 대표는 "피지컬 AI가 산업 현장으로 확산되기 위해서는 AI가 실제 환경을 보고, 이해하고, 행동으로 연결하는 과정을 엣지 AI 디바이스에서 빠르고 안정적으로 처리할 수 있어야 한다"며 "이번 VLA 최적화 성과는 노타의 AI 최적화 기술이 피지컬 AI 시대의 핵심 기반 기술로 확장될 수 있음을 보여준 의미 있는 사례"라고 말했다.